시작하기
이 문서는 한국 베타테스터를 위한 매뉴얼 문서입니다.
각 커맨드는 리눅스를 기준으로 작성되어 있습니다.
개요
베타테스터 여러분, 환영합니다.
XELNetwork는 (DYNAMI)XEL 프로토콜을 사용한 네트워크를 구축하기 위해 만들어졌습니다. 특히, 저렴한 시리얼 인터페이스(TTL/RS485) 기반으로 플러그 앤 플레이(약칭, PnP)를 가능케 함으로써 보다 편리한 개발방식을 시도해 보는 것이 1차 목표였습니다. 따라서, 베타테스터 패키지의 구성은 PnP기능을 위함이며 이는 ROS2의 토픽을 자동생성하는 예제를 포함하고 있습니다. 이 매뉴얼은 이를 위한 가이드문서이며, 유저가 이 외의 기능을 활용해보거나 직접 개발할 수 있는 환경 구축에 대한 내용을 포함하고 있습니다.
패키지 구성
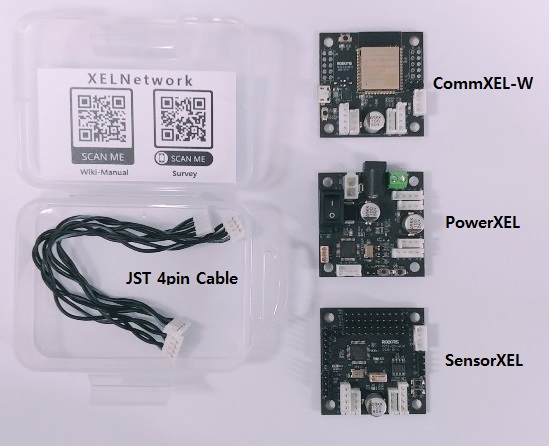
- 베타테스터 패키지 구성
- CommXEL-W * 1ea
- PowerXEL * 1ea
- SensorXEL * 1ea
- JST 4핀케이블 * 2ea
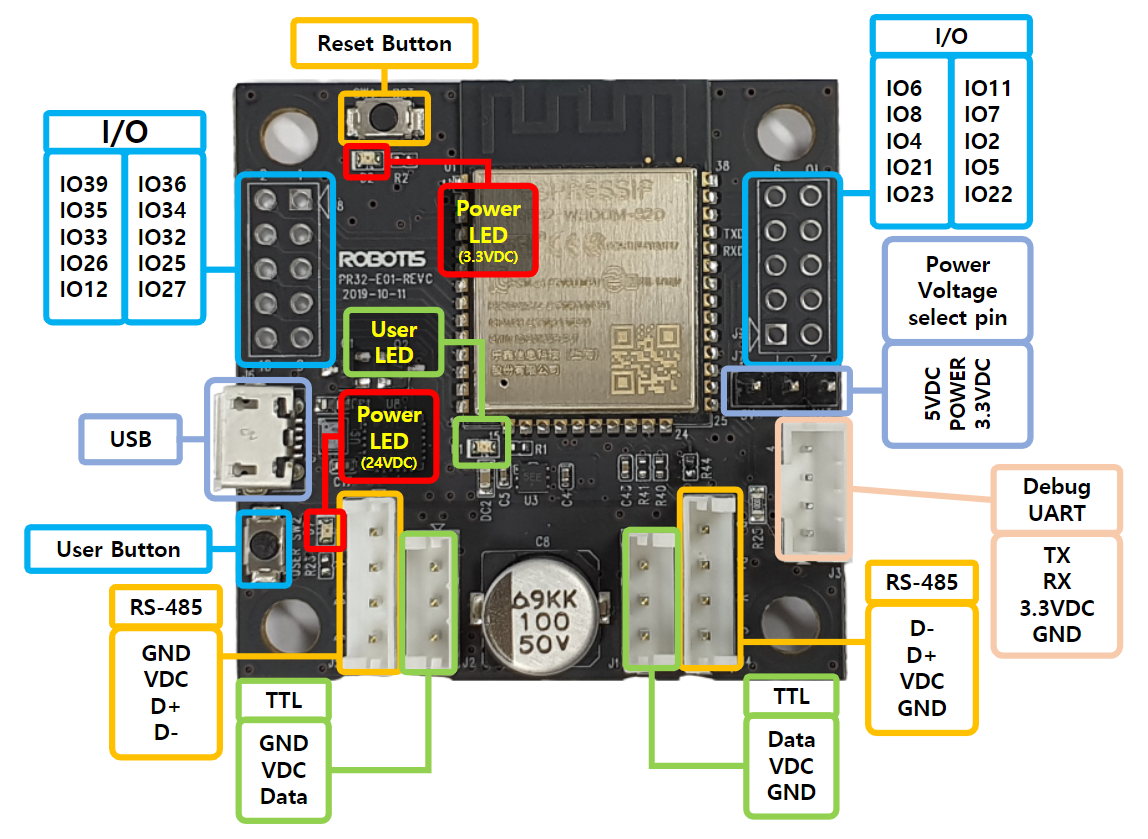
- 하드웨어 스펙 및 핀맵은 hardware페이지 참조
의존성 설치
ROS2
아래 문서를 참조하여 설치. (현재는 Dashing을 추천) - ROS2 설치 위키
Micro-XRCE-DDS Agent
ROS2(DDS, FastRTPS)와 통신하는데 사용. 자세한 내용은 ROS2의 DDS관련 자료 및 FastRTPS, XRCE-DDS 문서를 참조.
설치 방법에 대한 세부적인 내용은 eProsima의 공식 매뉴얼을 참조. Agent 버전은 ROS2 버전(FastRTPS 버전)에 의존적이기 때문에, 사용하는 ROS2버전에 따라 Agent를 설치. 이와 관련된 내용은 ros2arduino의 README를 참조.
아래는 베타테스터 패키지 펌웨어 및 ROS2 Dashing Patch4(혹은 ROS2 Eloquent) 기준.
$ sudo apt update
$ sudo apt install build-essential cmake git
# When you download this you must select the appropriate version.
$ git clone https://github.com/eProsima/Micro-XRCE-DDS-Agent.git -b 1.1.5
$ cd Micro-XRCE-DDS-Agent
$ mkdir build && cd build
$ cmake ..
$ make
$ sudo make install
$ sudo ldconfig /usr/local/lib/
CommXEL-W 설정 (with XELNetwork Manager)
XELNetwork Manager라는 GUI툴을 통해 CommXEL-W의 설정 변경 가능.
다운로드 및 실행
$ git clone https://github.com/ROBOTIS-GIT/XelNetwork_Manager.git
XelNetwork_Manager/excutable에서 자신의 OS에 맞는 폴더의XELNetwork_Manager실행- Windows: /win/XELNetwork_Manager.exe
- Linux: /linux/XELNetwork_Manager
- Linux의 경우, 포트(/dev/ttyUSBx)에 대한 권한을 허용해야 할 수 있습니다.
chmod혹은sudo usermod -a -G tty username사용할 것)
- MacOS: 지원 안함
- 혹은 아래 커맨드 실행
- Linux
$ sudo usermod -a -G tty username #필요한 경우 실행, username은 자신의 계정이름으로 변경
$ cd ./XelNetwork_Manager/excutable/linux
$ sudo chmod a+x ./XELNetwork_Manager
$ ./XELNetwork_Manager
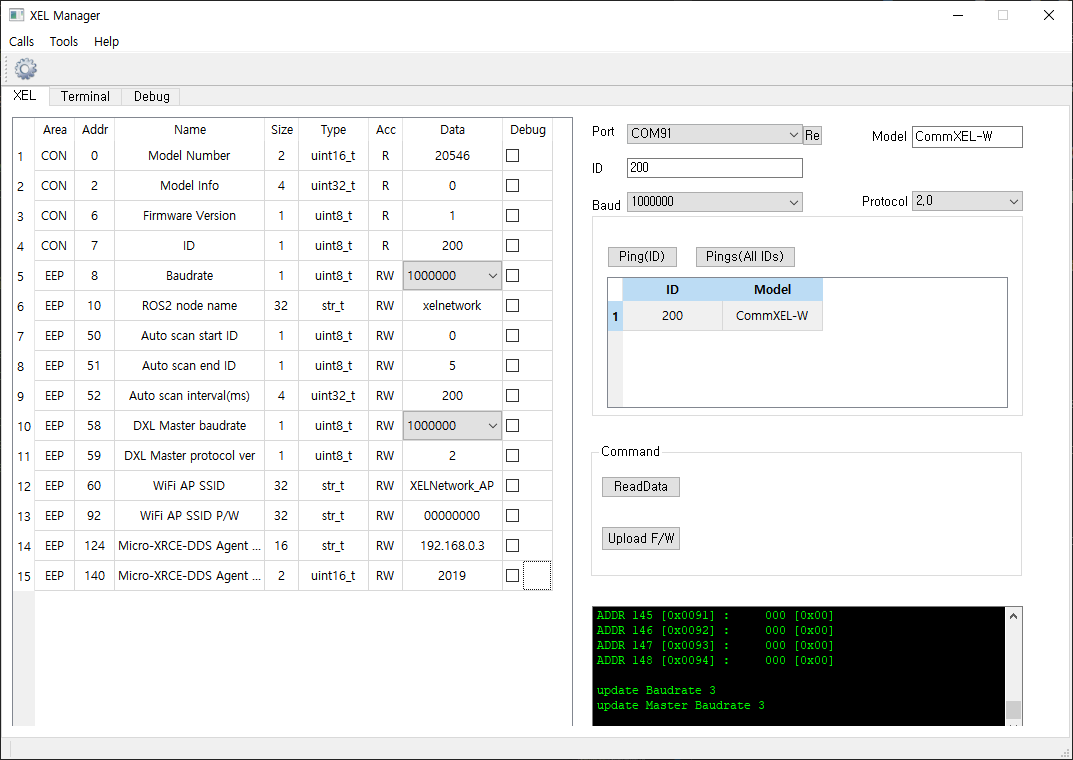
설정 변경하기
DYNAMIXEL의 컨트롤 테이블 방식.
-
기본 동작
- 올바른 Port와 Baud(rate), Protocol 버전을 선택합니다.
- ID 입력란에 올바른 ID(기본값 200)를 입력하고 [Ping(ID)] 버튼을 클릭하거나, ID와 상관 없이 모든 ID에 대해 검색을 하고 싶다면 [Pings(All IDs)] 버튼을 클릭합니다.
- Ping에 대한 응답이 정상적으로 이루어졌다면, [Ping] 버튼 아래의 박스에 연결된 장치가 나타납니다.
- 이 장치를 더블클릭하거나, 클릭 후 Command 박스의 [ReadData] 버튼을 클릭하여 컨트롤 테이블을 읽습니다.
- 화면 왼쪽의 컨트롤 테이블에서 정보를 확인하거나 원하는 값으로 변경합니다.
-
무선 네트워크 설정 (필수)
- Agent와 통신을 하기 위해, CommXEL-W의 무선 네트워크 설정을 해야 합니다.
- 12~15의 아이템들을 변경해야 합니다. (예시: 위 이미지)
- 14번(주소 124)의 경우, 위에서 Agent를 설치한 PC의 IP주소를 입력합니다.
-
컨트롤 테이블
주소 크기(Byte) 명칭 내용 0 2 Model Number DYNAMIXEL 프로토콜에서 컨트롤테이블을 구분하기 위해 사용하는 모델 번호 2 4 Model Info 모델에 대한 추가 정보를 기록할 때 사용 (비활성화) 6 1 Firmware Version 펌웨어 버전 7 1 ID DYNAMIXEL 프로토콜에서 사용되는 ID 8 1 Baudrate CommXEL-W의 USB와 연결되어 있는 UART의 속도. GUI및 Bypass모드에 영향을 주며, 이 값이 변경된다면 GUI Port의 Baud도 동일하게 설정해야 함 10 32 ROS2 node name ROS2에서 사용할 노드 이름 ( ros2 node list명령어로 확인 가능)50 1 Auto scan start ID 검색할 ID 범위의 시작값. PnP기능 사용 시, 주기적으로 CommXEL과 연결된 장치(SensorXEL, PowerXEL)를 검색하는데 사용됨 51 1 Auto scan end ID 검색할 ID 범위의 마지막값. Auto scan start ID와 동일한 기능이며, 이 ID를 검색한 후 다시Auto scan start ID부터 순차적으로 검색.52 4 Auto scan interval(ms) PnP기능을 위한 자동 검색주기이며 단위는 milliseconds(ms). 이 주기마다 하나의 ID에 대해 검색 58 1 DXL Master baudrate CommXEL-W의 DYNAMIXEL포트의 속도. 연결된 장치들(SensorXEL, PowerXEL)과 동일해야 함 59 1 DXL Master protocol ver DYNAMIXEL 프로토콜의 버전. 연결된 장치들과 동일해야 함 60 32 WiFi AP SSID CommXEL-W가 연결할 AP(Access Point, 무선라우터)의 SSID 92 32 WiFi AP SSID P/W AP 접속 비밀번호 124 16 Micro-XRCE-DDS Agent IP Agent가 설치된 PC의 IP주소 140 2 Micro-XRCE-DDS Agent Port Agent에서 오픈한 Port번호
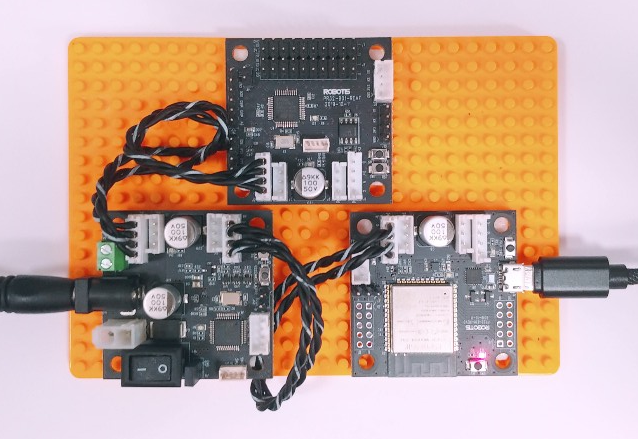
하드웨어 연결
- Power(Max 24V) - PowerXEL - SensorXEL - CommXEL - USB(필요시)
데모 코드 동작 확인
Agent 실행을 위한 기본설정파일 다운로드
- GitHub 링크에서 다운 받거나 아래 명령 실행
$ wget https://raw.githubusercontent.com/ROBOTIS-GIT/XELNetworkMaster/master/xelnetwork_default.xml.refs
- 관련 세부 내용은 여기를 참조
Agent 실행
- 위에서 기본 설정파일을 다운로드한 위치로 이동
- 네트워크 설정에 맞게 옵션주어 실행
$ MicroXRCEAgent udp -p 2019 -r xelnetwork_default.xml.refs
- 자세한 사용법에 관해서는 아래 명령어 혹은
링크확인
$ MicroXRCEAgent -h
ROS2에서 토픽 확인/전송
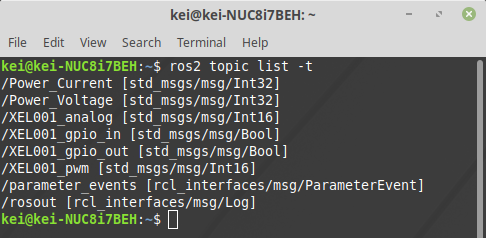
- 아래 명령을 통해 토픽 확인 (아래 화면과 같이 6개의 토픽 생성)
- Publisher
- /Power_Current from PowerXEL
- /Power_Voltage from PowerXEL
- /XEL001_analog from SensorXEL(ID: 1)
- /XEL001_gpio_in from SensorXEL(ID: 1)
- Subscriber
- /XEL001_gpio_out to SensorXEL(ID: 1)
- /XEL001_pwm to SensorXEL(ID: 1) (range: 0~4095)
- Publisher
$ ros2 topic list -t
- ros2 CLI 명령을 통해 토픽 테스트
- Publisher의 경우,
ros2 topic echo명령 - Subscriber의 경우,
ros2 topic pub명령
- Publisher의 경우,
# echo 예시
$ ros2 topic echo /XEL001_analog
# pub 예시
$ ros2 topic pub /XEL001_gpio_out std_msgs/msg/Bool "data: 1"
부가 기능
CommXEL-W 모드
CommXEL-W에는 두가지 모드가 존재
| 모드 | 설명 | 진입방법 |
|---|---|---|
| Plug and Play | 기본 기능 | User Button을 1초 미만(50ms 이상) 누른 후 떼기 |
| Bypass | USB-DXL 데이터 바이패스 | User Button을 1초 이상 누른 후 떼기 |
USB기준 동작은 아래와 같음
| 모드 | USB 동작 |
|---|---|
| Plug and Play | Config Tool을 통해 설정 변경 가능 |
| Bypass | 바이패스 통신, 속도는 1Mbps로 고정(업로드용) |
개발자 문서
참여 가능 레퍼지토리
| 레퍼지토리 | 관련 사항 |
|---|---|
| ROBOTIS-GIT/Arduino_Core_STM32 | SensorXEL, PowerXEL |
| ROBOTIS-GIT/arduino-esp32 | CommXEL-W |
| ROBOTIS-GIT/XELNetworkMaster | XELNetwork PnP의 마스터 기능을 위한 라이브러리 |
| ROBOTIS-GIT/XELNetworkSlave | XELNetwork PnP의 슬레이브 기능을 위한 라이브러리 |
| ROBOTIS-GIT/Dynamixel2Arduino | DYNAMIXEL 프로토콜 라이브러리 |
| ROBOTIS-GIT/ros2arduino | ROS2와 통신하기 위한 라이브러리 |
| ROBOTIS-GIT 내의 XELNetwork_* 레퍼지토리 | 하드웨어, 로더, GUI, 문서 등 |
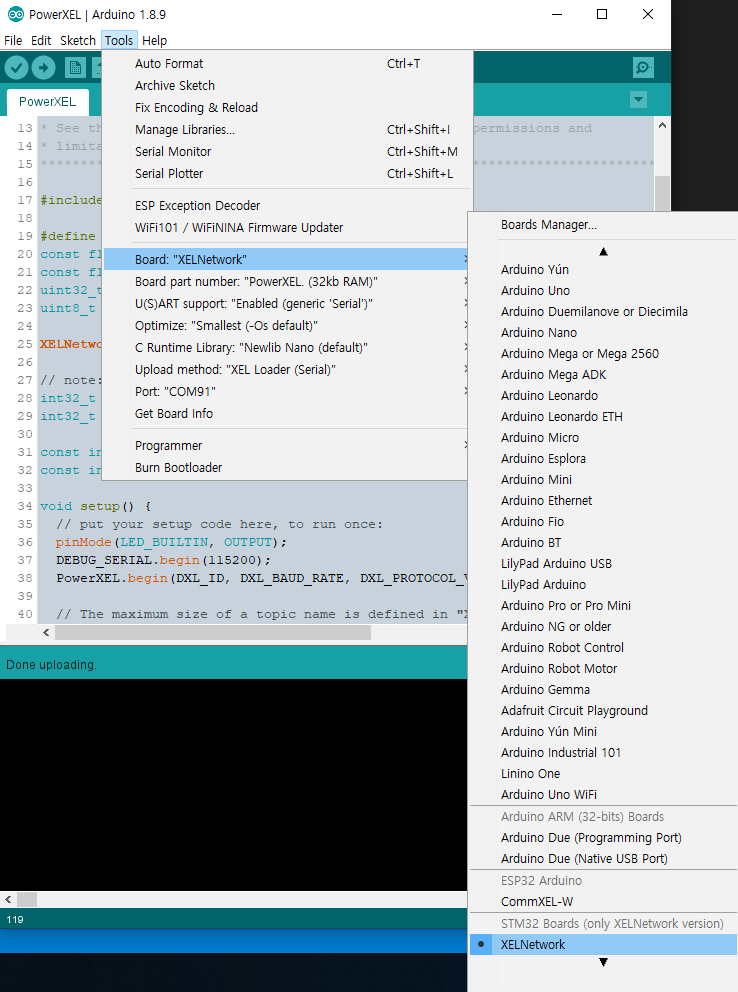
개발환경 구축
- 개발환경은 아두이노IDE를 지원
- 아두이노 설치 및 기본 사용법에 관해서는 아래 링크 참조
보드 패키지 설치
-
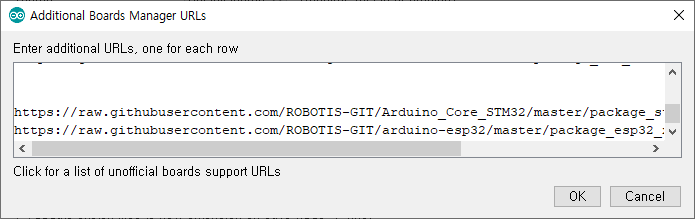
3rd Party로 URL 추가하기
- https://raw.githubusercontent.com/ROBOTIS-GIT/Arduino_Core_STM32/master/package_stm_xelnetwork_index.json
- https://raw.githubusercontent.com/ROBOTIS-GIT/arduino-esp32/master/package_esp32_xelnetwork_index.json
-
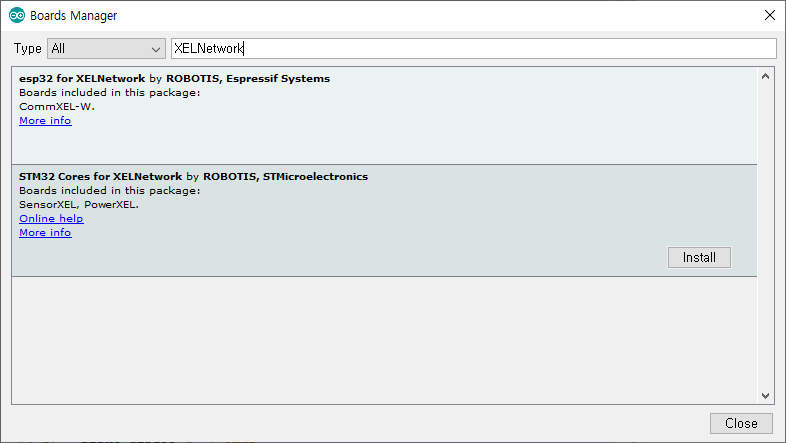
보드 매니저에서 설치
- "XELNetwork" 검색 후, 아래의 두 패키지 설치
- "XELNetwork" 검색 후, 아래의 두 패키지 설치
라이브러리 설치
-
라이브러리 매니저에서 설치 (공식 링크 참조)
- ros2arduino
- ros2arduino
-
수동 설치 (압축파일 방식, 공식 링크의 Manual installation 참조)
의존성 설치
- (Linux) esp32 for XELNetwork (CommXEL-W)
$ sudo apt install python-pip
$ pip2 install pyserial #dependancy for esptool.py
- (Linux) STM32 cores for XELNetwork (PowerXEL, SensorXEL)
$ cd <YOUR ARDUINO SKETCHBOOK FOLDER>/packages/STM32_XELNetwork/hardware/stm32/0.0.1/tools/xel_loader/linux
$ sudo chmod +x xel_loader #excution permission for xel_loader